Alan Fistwood
-
Posts
11 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by Alan Fistwood
-
Honey, I developed FFB joystick (DIY)
Alan Fistwood replied to propeler's topic in PC Hardware and Related Software
My progress so far, I scratched the previous design for now, because just in hardware and motors the price is over the 200€ mark, checked on my local marketplace and since used overboards sell for just 50€ I can get two motors for cheap, and by direct driving I can also save on belt and pulley, so I am working on this gimbal wich is similar to the original g940 but upscaled a lot, overal way simpler, still a long way to go before it's printable
-
Honey, I developed FFB joystick (DIY)
Alan Fistwood replied to propeler's topic in PC Hardware and Related Software
@propeler Will your firmware-board be able to use the sensors integrated into the hoverboard motor? -
Honey, I developed FFB joystick (DIY)
Alan Fistwood replied to propeler's topic in PC Hardware and Related Software
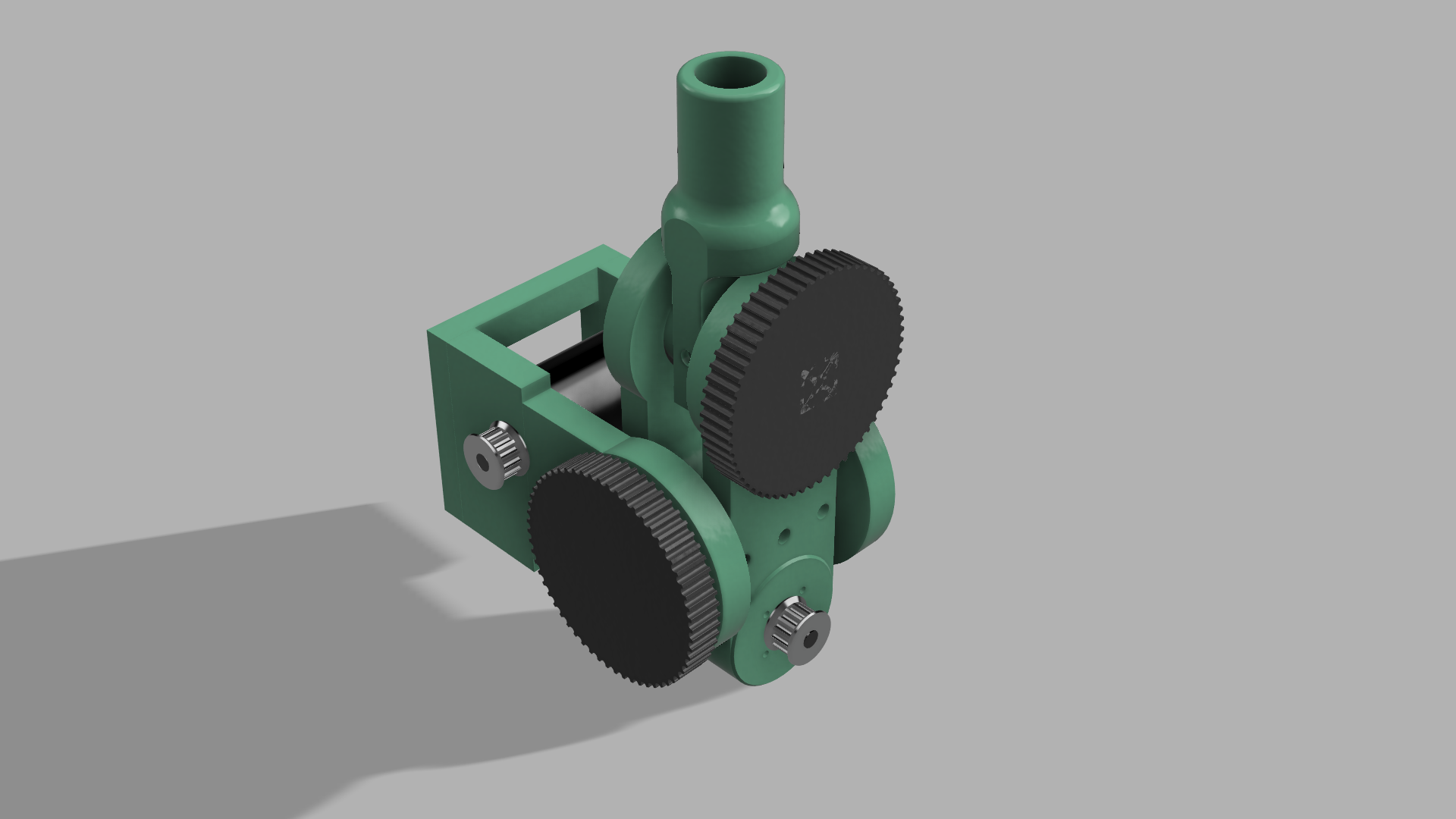
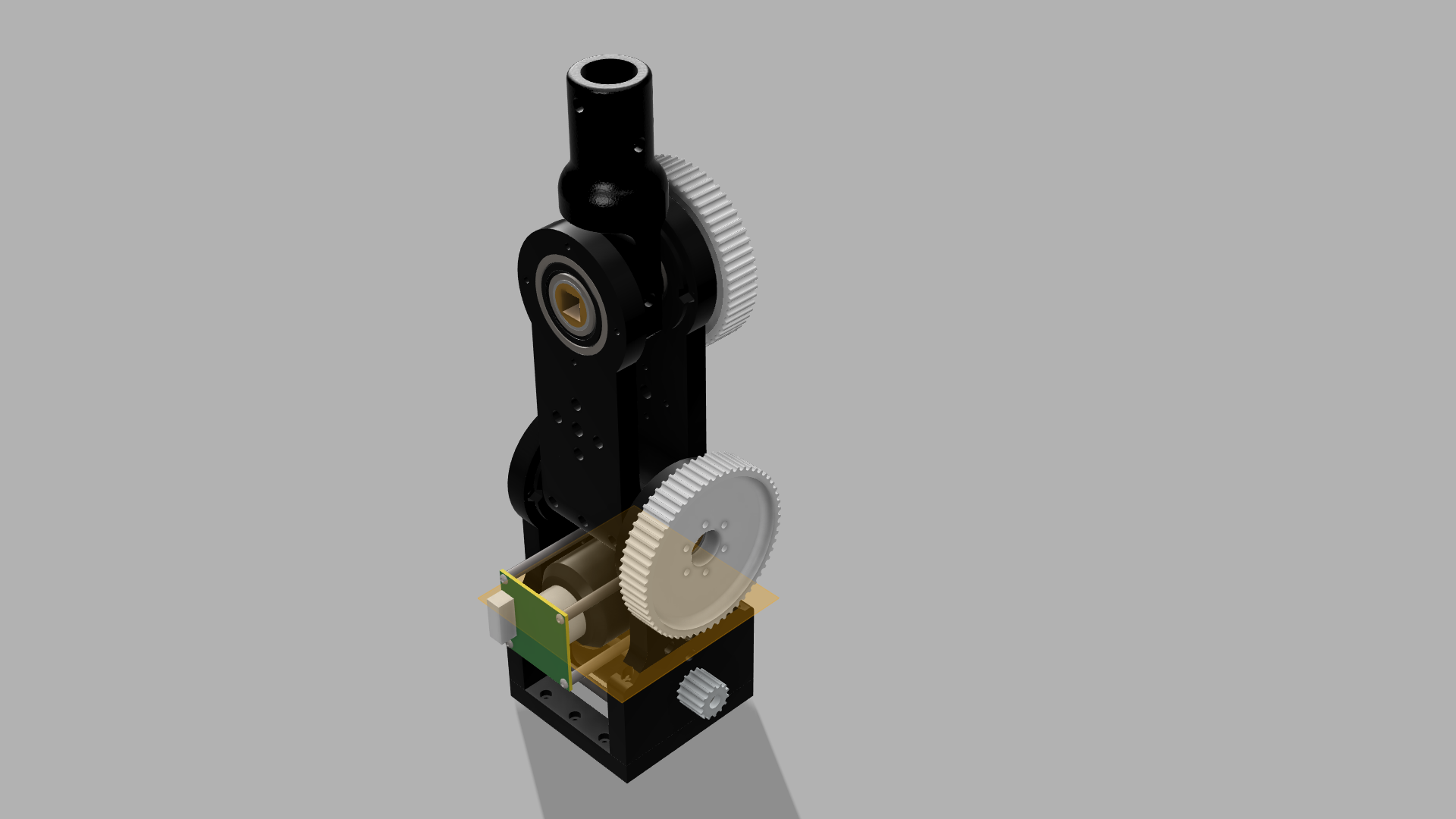
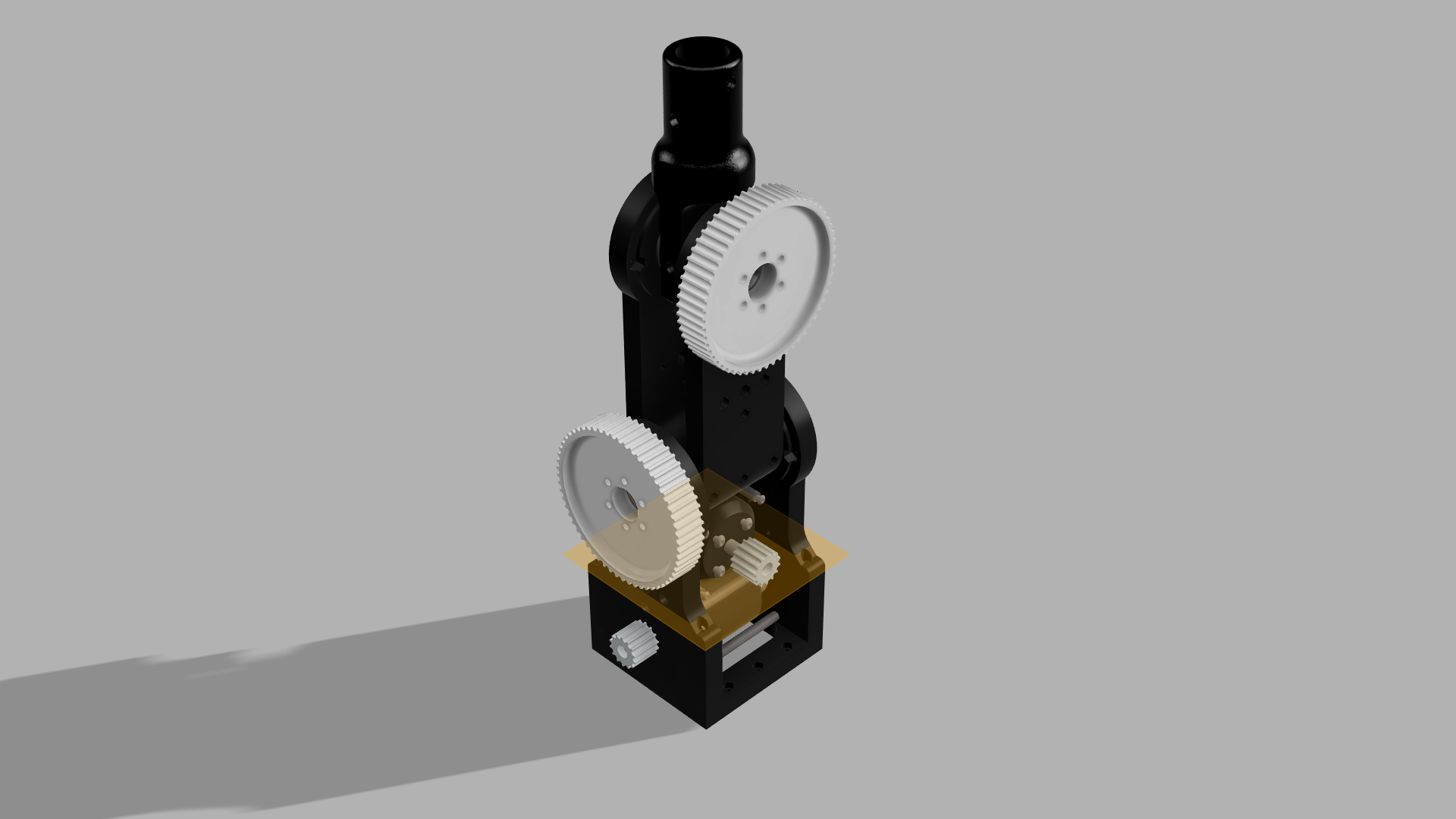
My Progress so far, did some changes on the arrangement to be able to mount it on a desk mount like Monstertech, changed the gear ratio from the original 0.20 to 0.23, this sacrifices some potential torque but allows me to have a compact enough gear, I'll add a gear and belt cover later on when I am sure of the layout. From the original design made by Hotpretzel I converted the size of the parts to metric measures, so the bearings now are easy to find 6006zz and the shaft for the axis is just a 2020 profile cut to length. With this configuration I can get at least 60° of motion in all direction (30° from center) and the stick is really compact and small enough that it can be printed on a 200x200 printer.
-
Honey, I developed FFB joystick (DIY)
Alan Fistwood replied to propeler's topic in PC Hardware and Related Software
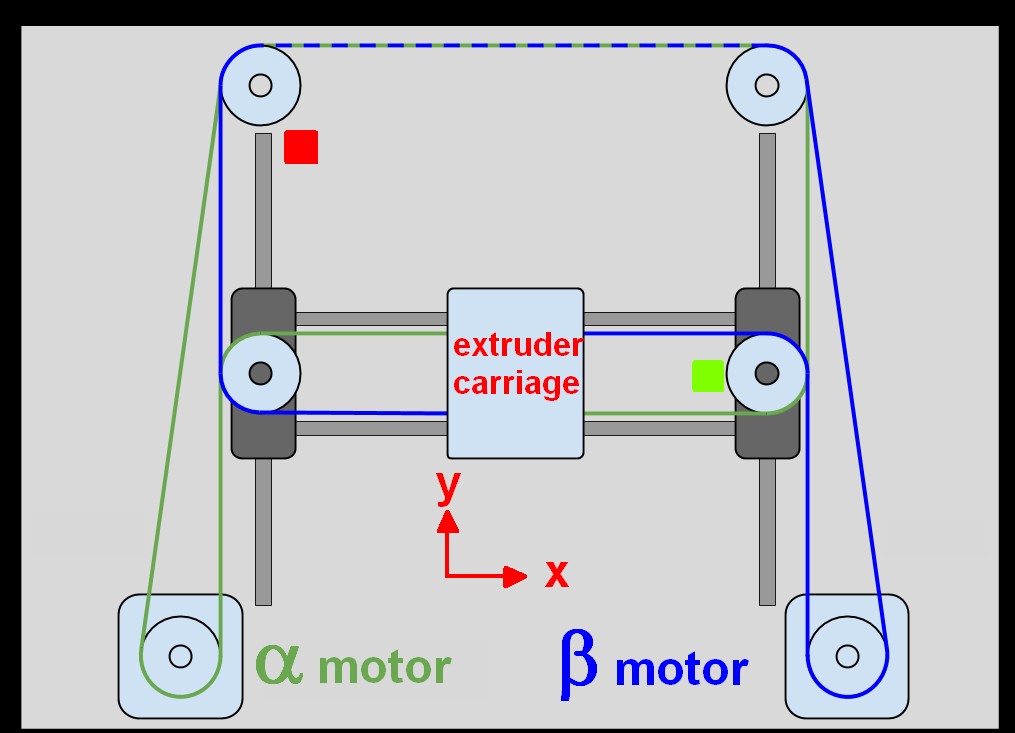
This is a better solution indeed Another advantage that comes to my mind on the CoreXY kinematics is that every workload will be shared always by two motors working together to obtain a movement on a singular axis, so by example if you keep pulling hard on a dive recovery you will not stress only one motor for obtaining the same force output but that force will be obtained by both A+B motor working together. This could benefit a lot smaller motors to avoid the overheating issues that you mentioned earlier from your testing. I'll try to design an do some motion simulation on something based on this sketches in the following days, but I am not sure I will ever be using Hoverboard motors, cause they take up to much space and I am constrained by space so i'll try to design something compact that can be upscaled just as a concept. -
Honey, I developed FFB joystick (DIY)
Alan Fistwood replied to propeler's topic in PC Hardware and Related Software
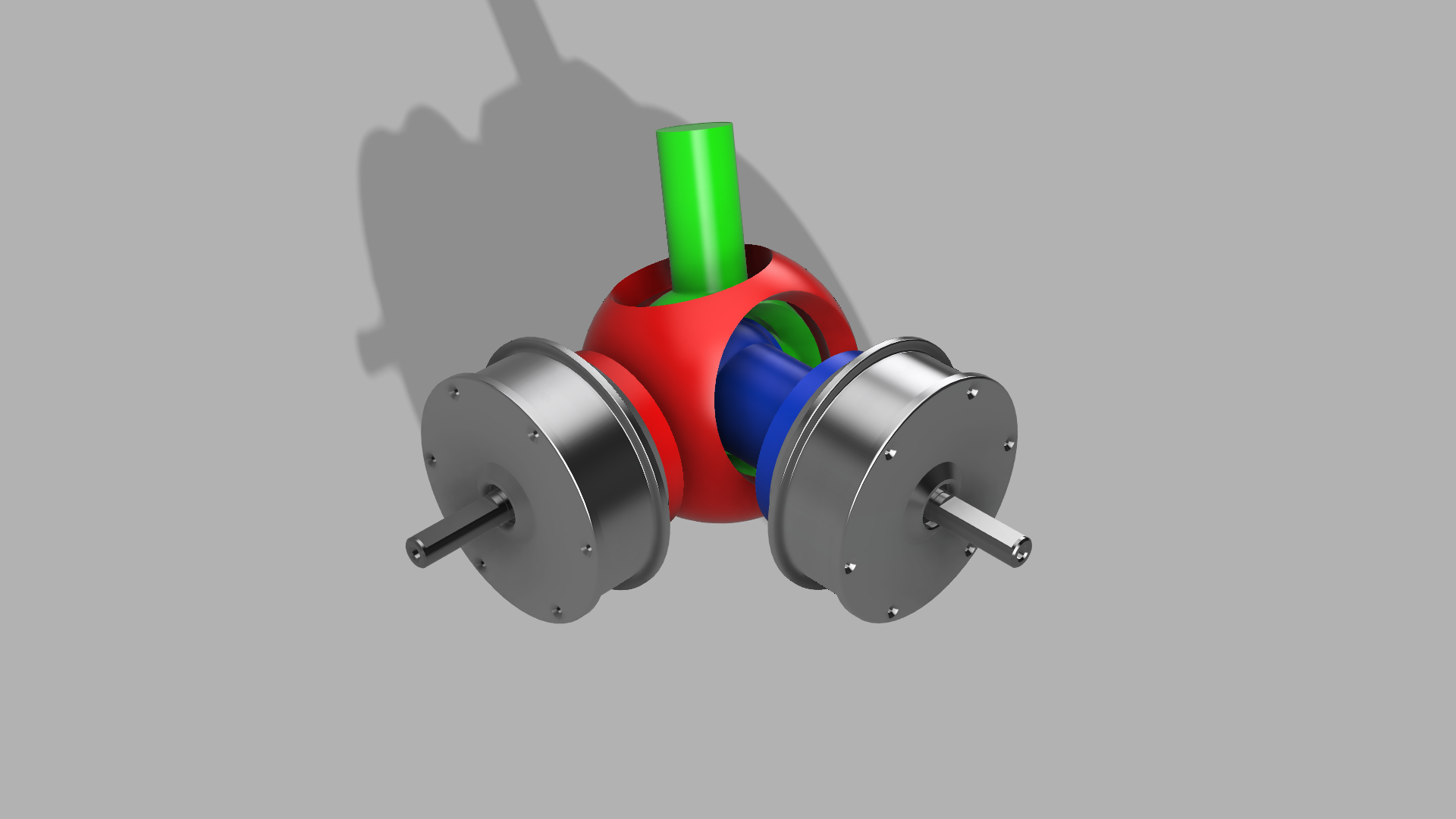
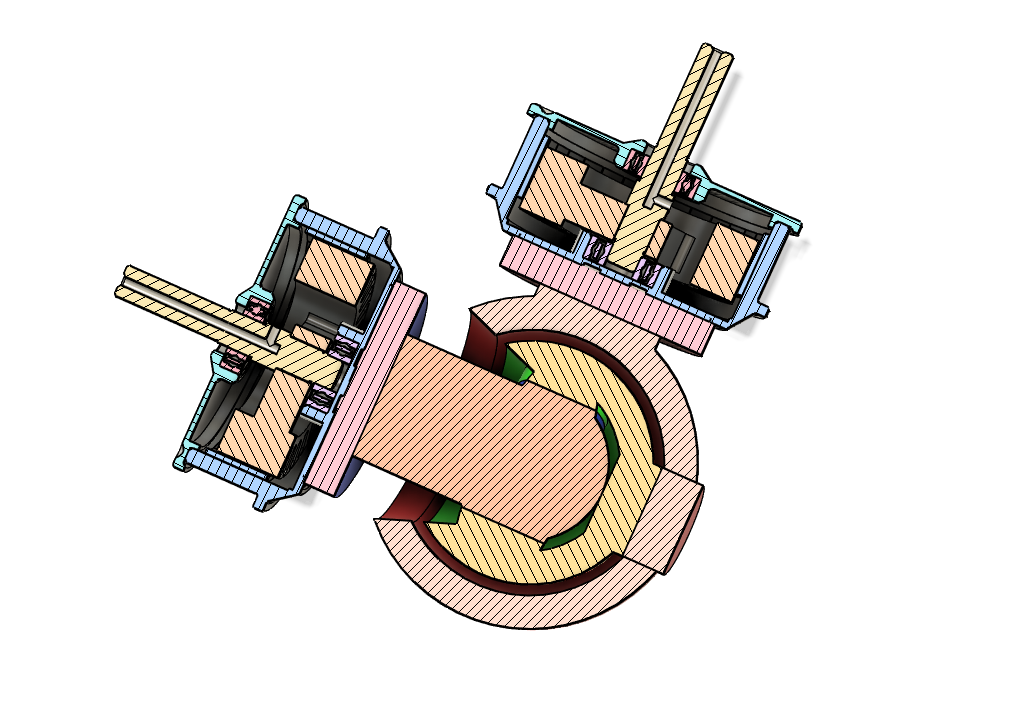
I got an idea for a kinematic scheme using hoverboard motors, the motion is applied by a CoreXY carriage moving a spherical bearing on the stick, the stick will be fixed at the bottom of the assembly by an universal joint, and the carriage will be moved by the two motors via a belt-pulley system, the belt pulley system will act as a failsafe if something goes wrong, the motor can be mounted on a rigid structure while the moving parts can still be made of 3D printed or lasercut parts. What this will imply is that a cartesian to CoreXY kinematic conversion, and vice versa, should be made via firmware or software before the signal goes to direct input.
-
Honey, I developed FFB joystick (DIY)
Alan Fistwood replied to propeler's topic in PC Hardware and Related Software
Hoverboard Motors are really bulky tough strong, I can't think of 3D printed mechanism will hold their weight for long, let alone their strength. But for rudder pedals (not sure if DirectInput supports also pedals) they would be easy to be adapted: Motor at the center, pedals on two rails, and a belt loop that slides the pedals, you could simply mount a bar on the motor hub and those would be fine enough for pedals, but i would not risk having my feet near the bar because if your feet are near it and the motor goes berserk say goodbye to your feet. For both stick and pedals I think that belts add a lot of safety being that if something goes wrong the belt will be the first point of faliure. -
Honey, I developed FFB joystick (DIY)
Alan Fistwood replied to propeler's topic in PC Hardware and Related Software
So the problem with those type of motor is that by using them just as springs they will overheat and not deliver the performance they have on paper, so low kV is king for this application? -
Honey, I developed FFB joystick (DIY)
Alan Fistwood replied to propeler's topic in PC Hardware and Related Software
The shaft it's designed to be just a centering pin, the pulley (originally the propeller hub) should be bolted to the spinning part of the motor case, and the motor should be mounted on the non-spinning part as usual. It's aimed towards high-efficiency or Heavy-Lift multi rotor drones that uses larger than usual propellers, I guess this motors are derived from stabilization gimbal motors, an I've seen the used on DIY robotics project to actuate limb-like assemblies. On the spreadsheet from Odrive I've linked whey they compare some motors, it's the second worst one in the RPM chart with no Load, but the second best in the torque chart, I deduce they designed this with torque in mind. I am also assuming that the APS 5063 specs are comparable to the ones of the 5065 that can be seen compared in that same spreadsheet, I did not considering weight as a big constraint will not move to much, but it could become an issue if the weight on the motor would put strain on some moving parts, the still parts can be made bigger-tougher to withstand the weight. -
Honey, I developed FFB joystick (DIY)
Alan Fistwood replied to propeler's topic in PC Hardware and Related Software
What are your thoughts on the 9235 Turnigy Mulitistar (also found on AliExpres as 8318) for FFB use? They are widely use for robotics and they are optimized for delivering torque, regarding price they can be found around the same price of APS 5063 I have used this datashet from ODrive for reference, and you can get more than twice the force out of them: https://docs.google.com/spreadsheets/d/12vzz7XVEK6YNIOqH0jAz51F5VUpc-lJEs3mmkWP1H4Y/edit#gid=0 I am considering switching to them for my design. -
Honey, I developed FFB joystick (DIY)
Alan Fistwood replied to propeler's topic in PC Hardware and Related Software
My early plan to build this by remixing hotpretzel Valkyre Flight Stick as a starting point, so splitting the two axis as someone suggested earlier, will upload files as soon is finished and working, I kept the same gear ratio as the original Propeler design for now. This would be perfect both for a Spitfire spade grip or a F14
-
I have one, I'll DM you.