propeler
-
Posts
153 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by propeler
-
Joystick for small hands. Virpil Alpha with ext or VKB MCG with ext?
propeler replied to AngleOff66's topic in Input Devices
MCG not for small hands. Check VKB Kosmosima. It is really very compact grip with excelent functionality. -
It's not a DCS bug. It's VD. I have the same bug with all other games I play. ACC, rFactor2, Alyx. All periodically switch sound to speaker after returning to playing after headset wakeup.
-
That's the exact problem. Not the size of dots, but visibility in transition zone from dot to model. In 2.8 dot size was perfect in VR (for me at least) and there was no questions. And I'm sure it's only mater of size tuning. But there was(and exists) a problem on distances when dot disappears. Plane just becomes invisible. No mater on sky background or on ground background. There is a dot, then bigger dot, then bigger...... then dot disappears and you see nothing. And it is a problem.
- 123 replies
-
- 1
-

-
- investigating
- spotting
- (and 1 more)
-
Или вариант еще проще. Просто сделать FFB на ось педалей. Как на осях рус. И тогда никакой телеметрии не надо
-
Давайте я попробую обьяснить. Как автора сиго дела. На данный момент для модуля реализован FFB. Стандартный дирктикс. Через этот эффект реализован тример рус. И он работает прекрасно. Когда жмакаешь хаткой тримера на FFB джойстике ручка смещается на величину offset которую игра передает в пакете для эффекта spring. Таким образом для рус у нас есть и сила пружины, и ее "центр" так сказать. Позиция в которую стремиться отпущеная ручка. Но. FFB в DCS сделана на 2 оси (никто и не предполазал что будут когда то FFB педали) и поэтому усилия на педалях приходиться скажем так "выдумывать" в меру познаний о том как они должны работать и в меру данных которые мы можем вытащить из телеметрии. Хорошо - если бы можно было получить данные о том где находиться текущий "центр" (позиция в которую будут стремиться педали если снять с них ноги) в диапазоне -1.0 / +1.0 . Еще лучше - если будет какой-то единый пакет в котором буде сразу данный по всем трем осям. Вообще идеально - если будет какой-то стандартный пакет для всех летательных аппаратов по которому можно воспроизвести силу загрузки на ручке. Например: struct { float forceGradient; // kg per unit of stick travel float centerOffset; float shakingFrequency; float shakingMagnitude; } Или что-то подобное по трем осям, которое можно будет взять методом из Lua скрипта. Нам много не надо
-
Force Feedback Feature Set - Plans for Expansion ?
propeler replied to Phantom_Mark's topic in Controller Questions and Bugs
Not official. Calculating forces from telemetry. Unfortunately we will not get it until some big players enter the FFB joystick world. It does not make a lot of sense to support FFB for couple of DIY builders. And as for me standard Direct X FFB is a bit outdated protocol. It does not allow to utilize what is possible now on hardware side. I would better have just more data available in telemetry to build proper FFB. Several factors about hardware(at least max torque) need to be taken into consideration BEFORE force calculation. FFB calculated for weak Sidewinder device is dull and empty on powerfull FFB device with 10kg force on the grip level. It lacks details and nuances. And yep. FFB need to be done on module level, so ED could not do much there. -
Force Feedback Feature Set - Plans for Expansion ?
propeler replied to Phantom_Mark's topic in Controller Questions and Bugs
Actually current firmware supports couple more effects that are in the list above. And there are some in work now. Here you can see some effect settings -
Force Feedback Feature Set - Plans for Expansion ?
propeler replied to Phantom_Mark's topic in Controller Questions and Bugs
On my joystick most of it implemented. 1. yes 2. roll yes, joint bumps hardly possible even if to implement natively. It is only texture feature. 3. in work 4. in work 5. in work 6. yes 7. yes 8. yes. It works for all planes -
В швайцарию нимагу)

-
Пока что мне никто не сказал что на FFB надо меньше усилия . З.Ы. Может таво, как-то соберем на FFB джой и отправим в ED. Я б мог это и сам сделать если бы был адресс в Европе. Я могу только по Европе выслать.
-
will it have FFB from the initial release (early or access I presume)?
propeler replied to peachmonkey's topic in DCS: La-7
I think less then 0.001% But are there -
Full throw, FFB, realistic forces up to 12Kg force on stick.
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Further evolution of mechanic part. Both stick and pedals: -
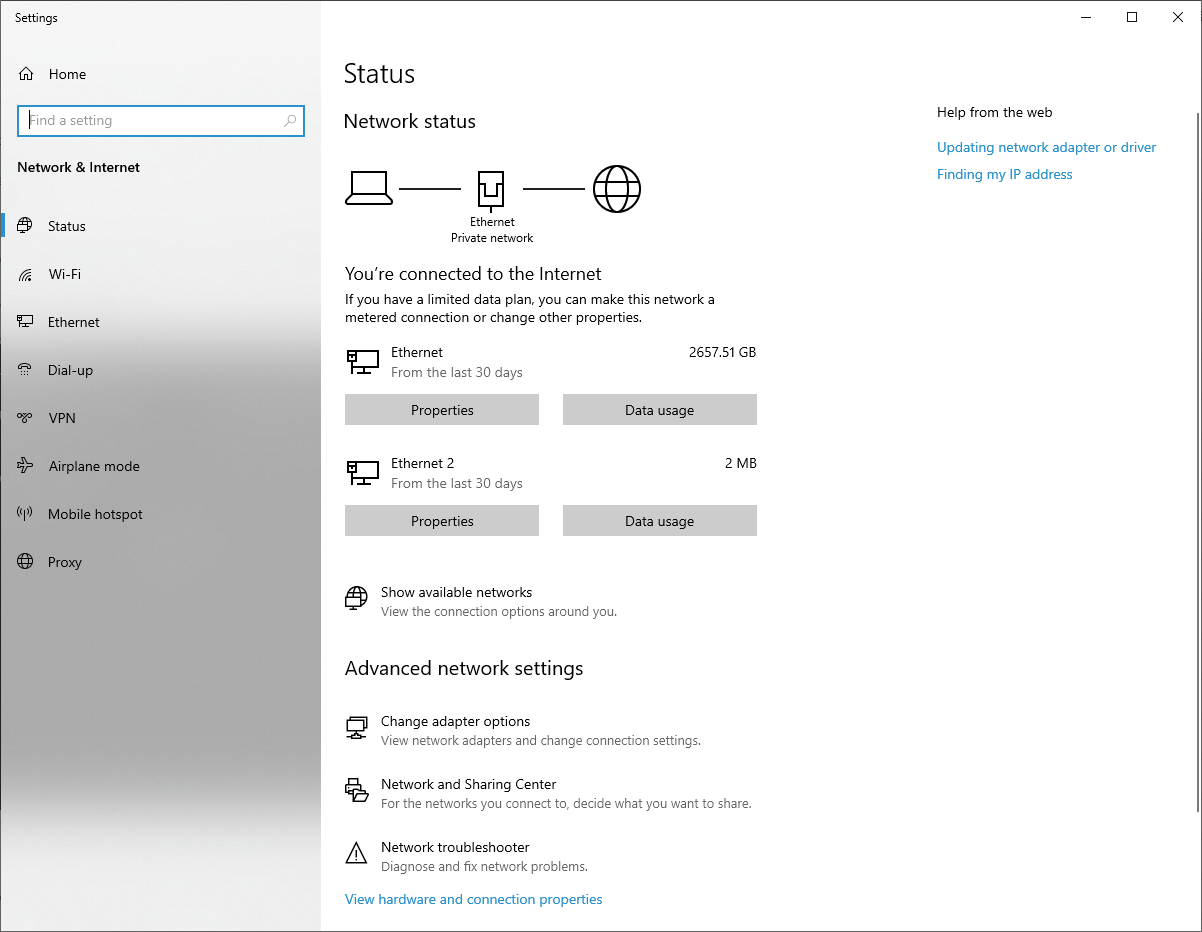
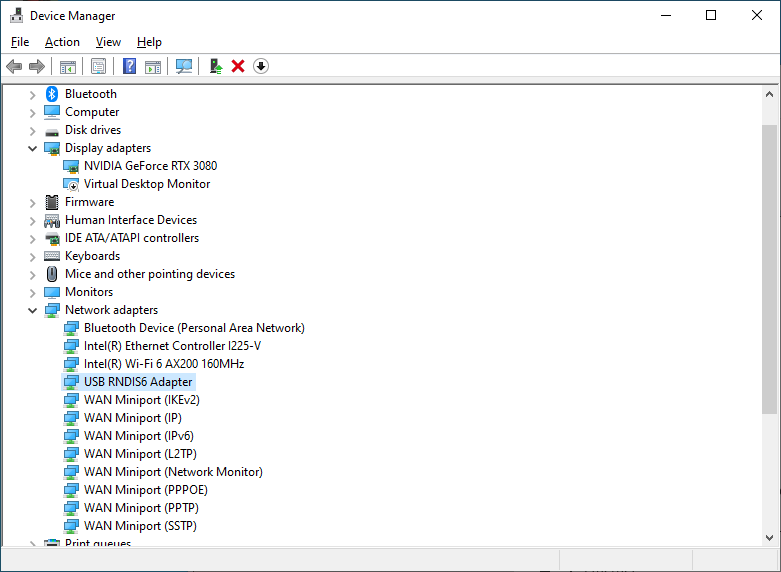
@RealDCSpilot May be you could help. I'm trying to setup Tethered USB on Pico but without a success. I've managed to enable tethering on Pico side: And second ethernet connection is visible on Windows side: But no connection to to network visible on Pico side: And VD disconnects immediately when turn of WIFI. The same with ethernet usb-c adapter. When connecteed to Pico it does not see connected ethernet. Android mobile phone see it immediately on conection by the way. What could be a reason?
-
GeekVR mask arrived. Pico is awesome with it! Excelent FOV. That's what I really see on DCS from neutral position after VR reset pressed. Green is thinner mask, pink - thicker one. There two of them in a set:
-
Does it work for you? I constantly getting message that key is not supported on last open beta DCS
-
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
Walmis is another guy with his own alternative approach to FFB. -
Honey, I developed FFB joystick (DIY)
propeler replied to propeler's topic in PC Hardware and Related Software
My device comunicates with DCS both direct input FFB and with additional telemetry for more precise airdynamic effects. For general description better ask your questions it will be easier. -
Printed test version of face mask. Almost what I want. Could be lower even more 3-4mm. FoV increases SIGNIFICANTLY! I do not understand why original mask is so bad. Why not to make lo profile mask from very beginning. Need to redraw mask with lower profile on lower part of mask to produce more correct angle. In current edition it slightly turns headset upward.
-
Through the lense. Just VD on ultra, 150Mb. SteamVR without any dirty hacks. Why to bother with OpenXR?
-
Headset PPD. For example. I can compare Pimax Artisan and Pico 4. On Artisan rising any settings and rendering resolution over around 2000px does not give any image quality in headset. Just because screen can not show clear picture even if it is rendered with 4000px size. But Pico 4 even on 2160px showing clear picture with readable texts on MFD in F16. Just because it has enough PPD to show what is rendered 1 to 1. And because of that I can get more clear picture with lower render scale on Pico then on Artisan with higher render scale. So. To get clear texts in cockpit you need to choose headset with higher pixel density on deegree. Hp G1/G2, Aero, Pico 4, Pimax Crystal and so on. You will not be able to get clear texts on headset which PPD is less then 20.
-
I just wrote it about everybody, not about you first So I was arguing against it
-
And how it simulate variable force on stick depending on speed of flight and AoA? You can not judge things that you did not try. I work on my devices in pair with the real pilot, flying different types from acrobatic to business jets. And on his opinion FFB stick is the most valuable thing for flite simming. buttkicker is not even close to things that FFB stick and pedals could give in terms of information and feel of airplane.
-
Do someone have both Pimax 8KX and Pico 4?
-
It simply that not all of us there could spend 2k $ on GPU upgrade when on other GPU quality could be good enough to enjoy the picture. In ideal world all flight simmers are playing in most modern VR headset on most powerful GPU. But unfortunately we are living in the far from perfect world.