LJQCN101
-
Posts
509 -
Joined
-
Last visited
-
Days Won
1
6 Followers



Recent Profile Visitors
21120 profile views



-
I think CAT III and Takeoff & landing gains are worth testing too. The DFLCS control logic are: In CAT III, roll rate command is reduced by 134 deg/s, plus the reduction by the dynamic roll rate command limiter. So the maximum roll rate command is 324-134=190 deg/s. In Takeoff & landing gains, CAT switch is ignored. The maximum roll rate command is 167 deg/s.
-
I started to wonder if ED actually uses the roll command gradient curve from NASA FLCS (TP1538) and Analog FLCS, instead of DFLCS. So I did the maths. In NASA FLCS and Analog FLCS, the roll gradient curve is pretty different from the one in DFLCS: 1. Analog FLCS requires 13.6 lbs stick force to command 179.2 deg/s, and 17 lbs to command 308 deg/s. Note that the maximum roll rate command is 308. 2. DFLCS requires 12.5 lbs to command 179.2 deg/s (as in the above test), and 17.57 lbs to command 324 deg/s. Note that the maximum roll rate command is 324. (In case I'm drunk, the known figures in Analog FLCS roll command gradient curve are: 11 lbs for 80 deg/s, and linearly extends to 17 lbs for 308 deg/s. DFLCS: 9 lbs for 80 deg/s, and linearly extends to 17.57 lbs for 324 deg/s.) So in Analog FLCS, it would require 13.6/17 = 80% stick input to command 179.2 deg/s, while in DFLCS the figure is only 71%. And if you check the test result again, this exactly matches what currently is in DCS. Smaller stick inputs may have had a bigger impact if Analog FLCS is used instead of DFLCS. For instance, at 11 lbs stick force, Analog FLCS is only able to command 80 deg/s roll rate, while with DFLCS the figure is 137 deg/s. That's a 71% increase.
-
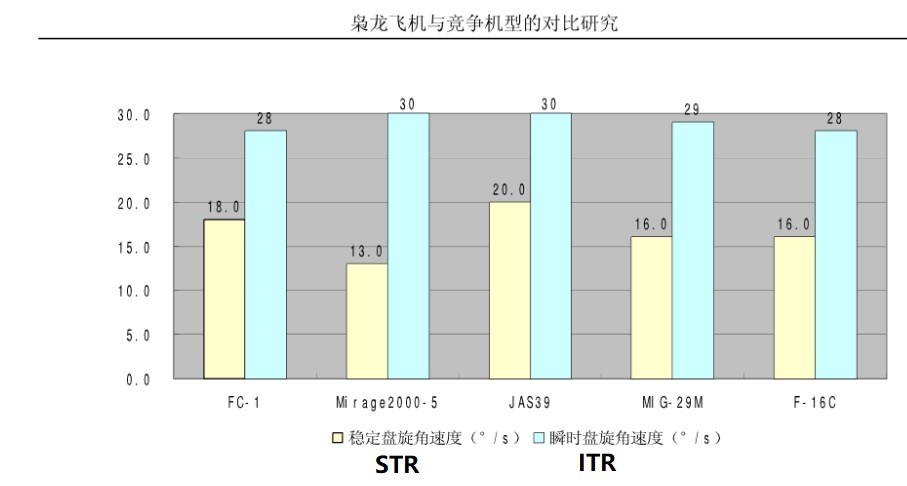
I know one document that matches his description of STR=18 and ITR=28: The document is written by the school of Economics and Management, Beijing University of Aeronautics and Astronautics. It's publicly available (you can search for it's name), but the conditions are still no where to be seen. The aircraft in question is seems to be a prototype No.01-03. PS: Appears to be the same guy: https://zhuanlan.zhihu.com/p/121523089

-
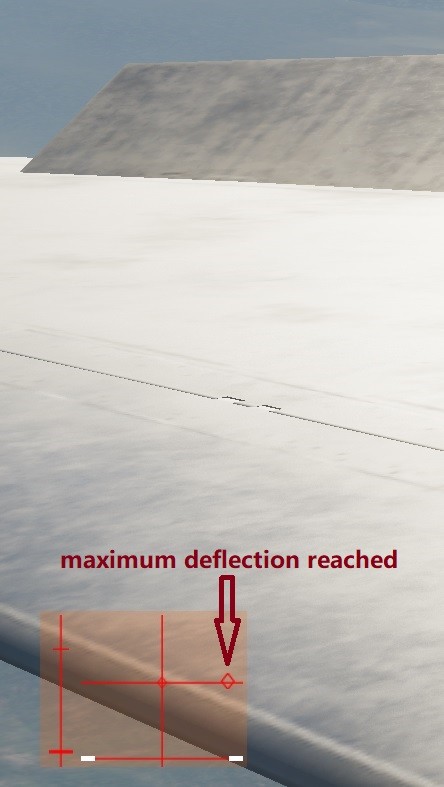
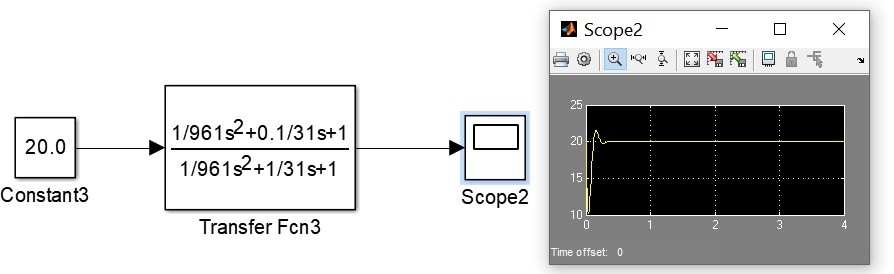
Okay I did a simple test to run through some figures according to the DFLCS block diagram. Some preparations: (text in bold is for TL;DR) 1. I'm using active pause to stop the roll rate feedback from intervening the result, so that it's only about the stick input and the flaperon output. 2. I'm also choosing an high enough dynamic pressure (airspeed greater than 250 KCAS or Qc > 210 psf) and a low AOA (less than 4.2 degrees), and also elevator position less than 15 degrees TEU, to prevent the Roll Rate Command Limiter from reducing our maximum roll rate command. So the maximum roll rate command can stay at 324 deg/s. By freezing any other parameters, the lateral control law can be simplified as this: (roll rate command - roll rate feedback) * 0.12, apply a -21.5 to 21.5 limit, and then apply a 1.5 deg mechanical bias, so that the final output to flaperon ISA is 20 TEU to 23 TED. So essentially, you're able to command a maximum flaperon deflection with a 21.5/0.12=179.2 deg/s roll rate command. By checking the DFLCS built-in roll command gradient curve, it corresponds to 12.5 lbs stick force, which is 71% of the full stick force range (17.57 lbs). Now we're getting a reference point to perform a test, to see whether the flaperon reaches its full deflection at 71% stick input. Test result: So no, I'm using a stick input at around 80% to reach the maximum flaperon deflection. It means either the roll rate command value is a bit low or the 0.12 gain is questionable. EDIT: rechecked the DFLCS curve, 179.2 deg/s actually corresponds to 12.5 lbs stick force, but the test result still stands. roll rate command test.trk
-
I agree it may not be the best/correct term out there (if you consider the meaning in signal processing). A better term would be reduce input noise or jitter. Surely it does not reduce the maximum command with the transfer function. Roll rate command limiter is another block in the diagram. The FCS of F18 doesn't have such designs. It has a 5 Hz notch filter applied to the stick lateral position sensor (Filter R2) but that's it. I'm yet to spot any lag filters in the path. So the command can be sent to the aileron without any prominent delays. On the other hand, I myself is a X65F user and I set 22 lbs for pitch and 13 lbs for roll, with the stick well fixed to the desk. Compared to T16000M that I also use as a backup, the time for me to reach the maximum force/stick deflection from neutral is a bit longer with a X65 than a T16000M, because of the much larger stick force. The end result is that I can feel more lag in the T16000M when flying the Viper because I can yank the stick so quick, the instantaneous lag between the filtered command and non-filtered command is very significant. But with the X65F, it's like you're moving the stick not as quickly, and the lag between the filtered command and non-filtered command is not so significant.
-
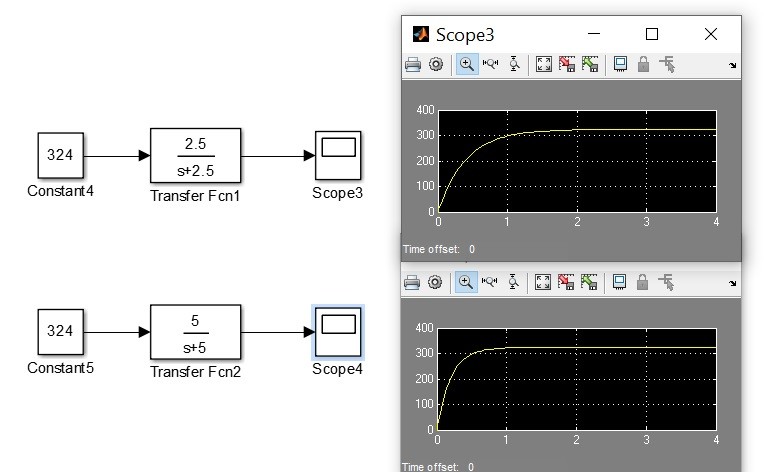
FYI apart from the built-in software breakout in the DFLCS, the roll rate command is also gone through a first order lag filter, which will induce lag and reduce sensitivity of the input. The transfer function is 5/(s+5), which will change to 2.5/(s+2.5) depends on conditions (i.e. at higher dynamic pressures). An example from SimuLink using a 324 deg/s roll rate command as input: It would take around 1 sec to go from 0 to 324 with a transfer function of 5/(s+5).
-
 TO answer OP's question it's a combination of an aero pack from the RL sim (simplified in the form of less LUT breakpoints), a CFD study of LERX+main wing (publicly available), RD93 tech doc, reverse engineering of CL&CD from EM diagram, and FCS tech doc including a set of control block diagram. Every sources complement each other. The equation of motion is a standard 6DOF rigid-body dynamics that is widely used in the industry.
TO answer OP's question it's a combination of an aero pack from the RL sim (simplified in the form of less LUT breakpoints), a CFD study of LERX+main wing (publicly available), RD93 tech doc, reverse engineering of CL&CD from EM diagram, and FCS tech doc including a set of control block diagram. Every sources complement each other. The equation of motion is a standard 6DOF rigid-body dynamics that is widely used in the industry. -
How to defeat ACE AI JF-17?『guns only 』
LJQCN101 replied to YenLin801215's topic in DCS: F-16C Viper
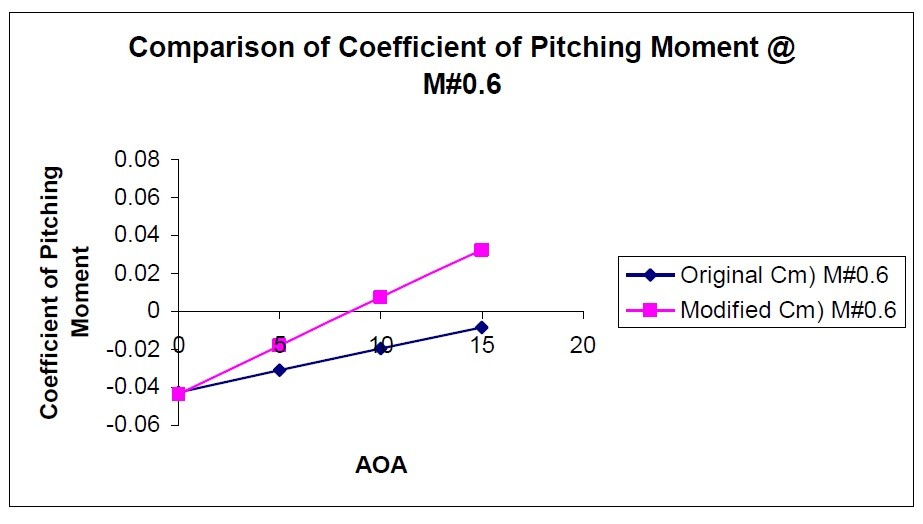
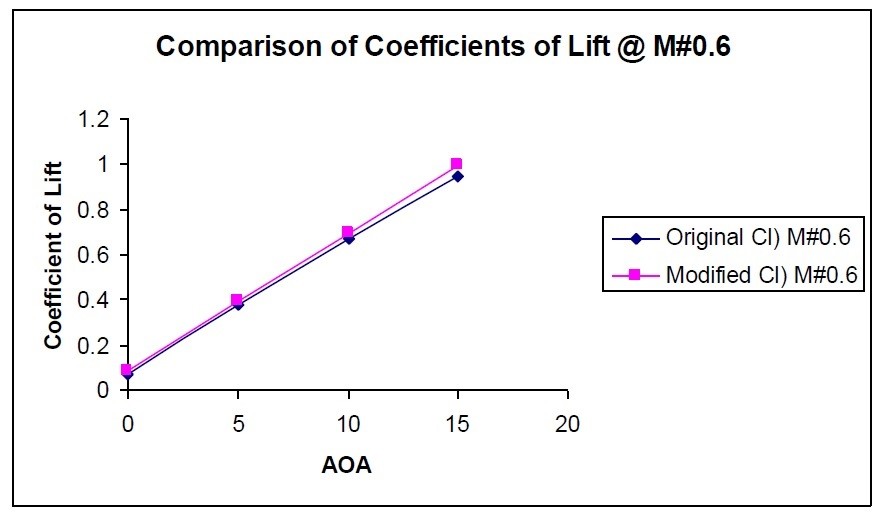
Now that we have a GW, but we still don't know the altitude and Engine Mode the flight test was based on. Regarding atmosphere conditions, an increase in temperature of 10 degrees for example would reduce the turn rate by 1-2 deg/s, dependant on airspeed and altitude. And for the LERX, the major difference was made since prototype No.04 and there's no difference between block I and block II. The effect is not only on lift coefficients (CL) but also on pitching moment coefficients (Cm), which greatly reduces trim drag in a maneuvering flight.
-
How to defeat ACE AI JF-17?『guns only 』
LJQCN101 replied to YenLin801215's topic in DCS: F-16C Viper
Now we're seeing some figures. In order for the fix to be efficiently pinpointed and pushed, please kindly provide the following conditions: 1. payload 2. Gross Weight or fuel weight 3. Thrust setting and Engine Mode (training, training-combat, combat) 4. deviation from the US Standard Atmosphere 1976 5. Altitude 6. Mach number at which the STR is obtained If you're using airshow video materials, the following additional data is required: 7. Airspeed gain/loss 8. Altitude gain/loss 9. Evidence that the video is not edited Then we can properly check them against our EM diagram, thanks. -
How to defeat ACE AI JF-17?『guns only 』
LJQCN101 replied to YenLin801215's topic in DCS: F-16C Viper
If you think something's wrong, bring a track and the proof via private message or anything of your choice, and then the FM review process can continue. If you don't trust us, you can PM ED staff or community manager directly, i.e. Yo-Yo or Groove, .BIGNEWY or NineLine. I don't think anyone is suggesting that you should break the 1.16. -
How to defeat ACE AI JF-17?『guns only 』
LJQCN101 replied to YenLin801215's topic in DCS: F-16C Viper
Follow up case opened, you're welcome to throw in anything. -
Recently I come across this post: I'll make a follow up case to see how I can utilize the proof, thanks.
-
How to defeat ACE AI JF-17?『guns only 』
LJQCN101 replied to YenLin801215's topic in DCS: F-16C Viper
Really, if the proof show that the JF-17 is overperforming, I'd love to make an adjustment more than anyone. I'm just a coder anyways and the only thing I do is to stick to the graph etc. -
How to defeat ACE AI JF-17?『guns only 』
LJQCN101 replied to YenLin801215's topic in DCS: F-16C Viper
Just saying, why would someone make a plane that overperforms in a game, is that any fun?