OmeZ
-
Posts
15 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by OmeZ
-
А, вот еще. Нашел мануал по какому-то програмно аппаратному комплексу 5летней давности по детектированию источника излучения через дифракционные решетки, попробую смоделировать в университете, может что получится. Точность обещают e=+-2.3мкм на GaAs лазерах и e=+-0.1 мкм на полимерных гетероструктурах. Если получится то при достаточной стабилизации питания и теплового режима на площади в 10кв см можно получить желаемые 2000x2000 минимум. Останется дело за ацп.
-
Вот именно, вся проблема сейчас в датчиках, и пока она преобладает. По поводу материалов и станков я имею практически неограниченый доступ в пределах города Минска. По поводу подшипников ты прав, вылетят быстро, т.к. если учесть поперечные нагрузки, то механика дисковода не выдержит, потому буду использовать первоначальный вариант с кольцами из дураля + 36мм торцевые роликовые подшипники, либо же аналогичные шариковые. В качестве макс. допустимого смещения оси буду придерживаться значения в 0.1мм В качестве возвратного механизма, наверное вариант на одно пружине. Также хочу решить момент автоколибровки при центровке положения РУС. Если откажусь от оптического детектирования, то посредством детекции оптопарой засечки на кольцах.
-
прошу прощения, исправил, не хотел показаться невежливым. Но... Я действительно прочитал данный форум фактически полностью. Единственное что заинтересовало - это использование механики дисководов и применимость датчиков холла. В общем оценил, но недостаточно для меня тех показателей, которые демонстрируют такие системы. Точность есть, но этого мало. Точность нужна исключительная, так сказать. Я понимаю, что можно всяко говорить что слишком супер не бывает, но все же я планирую добиться того для чего это все начал. Во всяком случае прошу оценить мои предложения и высказать нормальные комментарии по поводу, и какие могут быть недостатки, либо конкретные ссылки на материал, потому как перекурив всю ветку РУС я по этому поводу информации не нашел пока еще
-
тут вот в чем смысл состоит такой системы: 1) я не хочу в последствии копошится с механическими проблемами износа, люфтов, биений и т.п. решаетсяв общем то посредством подшипников и т.п., но факт остается фактом. 2) требование №1, что бы при наклоне рукояти на полградуса или смещении самой верхней точки штурвала на 2 миллиметра я имел смещение координаты, и если я вернул ручку на те же 2 миллиметра назад, я получил бы исходную координату назад, а не какое-нибудь другое значение. отклонение при этом составило бы доли градусоа. насколько я себе представляю практически никакой механический механизм не сможет обеспечить такой точности, потому что все упирается в механику монтажа 3) Дешевизна девайсов понятно, почитал доки на ресурсе что ты мне дал, только вот те круги которые там показывают идут посредством отклонений +-35%, а принимая во внимание размер штурвала и мой стиль управления, очень затруднительно будет проворачивать его на такие углы, т.к. ход рукояти будет превышать метр. пока все
-
либо же есть так-называемые позиционные ПЗС матрицы, разрешение где-то 1000X1000, но на самой микрухе оно размещено на матрице 3х3 мм примерно, таким образом при помощи простейшей оптики можно получить координату прямо с выхода микрухи. Что самое интересное, у них время отклика 3нс, а воздействие регистрируется только от когерентного излучения красного и ик диапазона
-
ну... даже если так, ты сам же сказал что проблему относительности координат еще никто толком не решил... правда у меня зародилась еще одна идея: в общем вместо светочувствительной пластины берем любую полупрозрачную и ставим под ней камеру, соответственно имеем красное пятно (без рассеяния, т.к. в случае гладкой поверхности все избыточное излучение будет отражатся). Это пятно снизу регистрирует камера с телефона какого-нибудь (на рынке 15 баксов за запчасть). Изображение обрабатывается каким-нить PIC'ом а? как идея?

-
блин, кажется ты не понимаешь принцип действия мыши в целом: мышь передает координату СМЕЩЕНИЯ указателя при ее перемещении на плоскости! электрически это выглядит так: ты перемещаешь мышь вверх - на выходе схемы появляется допустим логический сигнал "1", драйвер или чтотоещетам прибавляет к текущей координате положения указателя y=y+1*[коэффициент ускорения] и все. Т.е. АБСОЛЮТНОЙ координаты ты не получаешь. При движении вниз то же самое только первый множитель равен -1. Нам же нужна другая система, которая бы возвращала абсолютную координату положения РУС
-
теоретичеси возможно рекалибровать систему по относительной коодинате после перехода центра. Тем же оптическим элементом, теоретически. По поводу относительных координат, то ты прав. С точки зрения электроники принцип построен на передаче 0/1 сигнала по каждой из осей и паре триггеров. В принципе такую систему можно реализовать и на джое, правда сложновато, т.к. в процессе эксплуатации идет накопление ошибки, а постоянная рекалибровка центра имеет большие временные затраты, соответственно будет наблюдаться плавающая мертвая зона, что не есть гуд. не, герконы - ацтой, спец рисунок череват ошибками. В драйвере реализовывать нет смысла, т.к. проще на железном уровне. И вообще - рекалибровка центра - это плохо Ну блин, у меня была такая идея, но я от нее реально отказался. С счет тех же причин, что в оптической мыши. Все дело в относительности координат + сложность реализации. А еще и дополнительные мех. проблемы Все дело в том, что: нам нужны АБСОЛЮТНЫЕ координты на выходе. А реализация их через относительные - очень сложная задача
-
Гы, а почему бы и нет? А то что ты говоришь... не знаю. Может подкинь мне инфы для повышения эрудиции
-
А вот собственно и сам виновник торжества
-
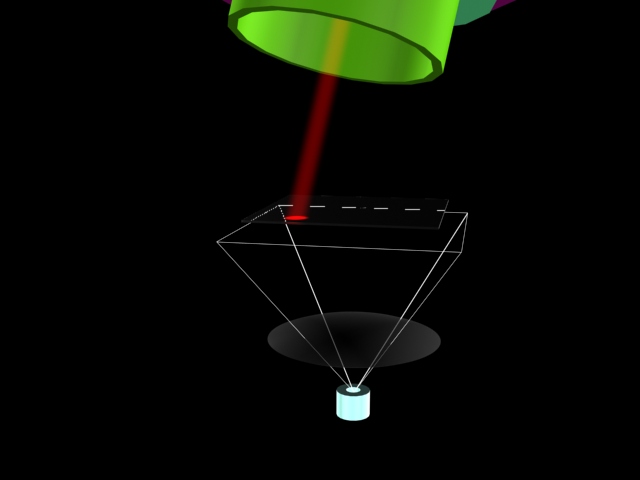
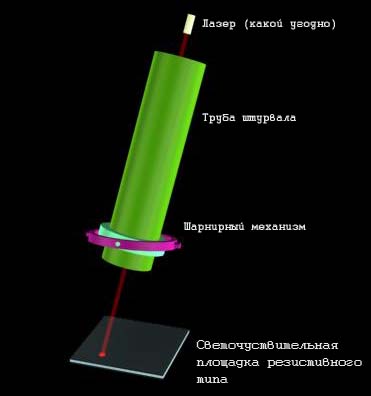
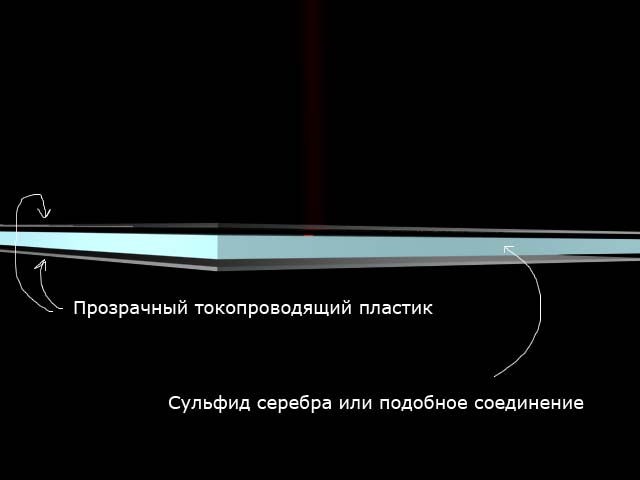
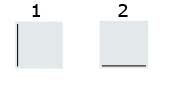
В приложениях 3 картинки: 1.jpg иллюстрирует пространственный принцип действия системы. Труба штурвала крепится к базе с помощью шарнирного механизма (кольца). Такие можно сделать на любом заводе за пузырь. А если еще немножко попросить, то туда еще можно на оси подшипники поставить. Но самое главное - в трубе крепится некий источник когерентного излучения (лазер). В принципе его можно даже из китайской указки выдрать, вполне подойдет. Только нужно также отрегулировать его фокус. Но самый главный и сложный в реализации элемент - светочуствительная пластина внизу. Крепиться к базе установки и на нее падает лазерный луч. Сама пластина (рис. 2.jpg) представляет собой 2 токопроводящие прозрачные пластины (нижняя не обязательно). В принципе я еще не придумал что это будет, скорее всего фотографический пластик либо кусок токопроводящего поляроида (есть такой, правда придется поискать хорошенько). принцип в том что этот пластик имеет довольно большое сопротивление. Между ними сульфид серебра или еще какая гадость, реагирующая на свет резким увеличением проводимости. Плюс ко всему по ребрам (как на рис. 3.jpg) пластин крепим по куску оголенного провода, причем на выход однго из них вешаем дополнительное сопротивление (какое, надо считать). Таким образом принцип заключется в том, что подавая например на верхнюю пластину определенное напряжение, то ток проходит через точку падения лазерного луча (т.к. в этой точке сульфид серебра становится проводником) и попадает на вторую пластину, а через нее на выход цепи. В общем случае мы получам некое сопротивление в цепи (за счет сопротивления пластин) которое меняется в зависимости от координаты падающего луча, а так как он все таки лазерный, то воздействие его рассеяния ничтожно мало на остальную площадь пластины. Дополнительное сопротивление на одной из пластин выпоняет роль делителя. Таким образом с помощью простейшей схемы с АЦП и парой дифф. усилителей (малошумящих) мы можем получить по предварительным расчетам чувствительность агрегата примерно до разрешения 5000х5000. Плюсы: система не зависит от люфтов, механических погрешностей и т.п. Высокая надежность и точность. Если принимать во внимание размер штурвала (длина ~0.6м), то я думаю мы заметим изменение координаты при его наклоне <0.1 градуса, т.е. сдвиге на около 1 мм. НИГДЕ не видел такой хрени =))) Минусы: сложность в реализации и диффицитные материалы.
-
Хотя есть идея о создании матричного лазерного детектирования на плоскости... если под рукой будет 3d max, то в принципе нарисую, выложу принцип
-
лимон баксов налом и продам =) а если серьезно, то я затрудняюсь не столько по поводу изобретения и изготовления рамки для него (а там есть о чем подумать) а сколько по поводу возможности установки детекторов. Дело в том, что учитывая размер самого штурвала очень сложно, как мне кажется, сделать резистивную (оптическую и т.п.) часть. Дело в том что при смещении рукояти допустим на 2 см. (а это достаточно заметно в игре) изменение угла наклона не превышает градуса, соответственно погрешность изменения сопротивления на резюке - большая, а точнось очень мала. Так вот как сделать такую систему? Также соит вопрос в возможности автовозврата джоя в нулевое положение
-
В общем ситуация такая, как то давно в одном аэроклубе я стибрил реальный штурвал управления миг-21 (блин, погнал, это от миг-23). С кнопками и ручным тормозом и т.п. И вот недавно я наконец решился забодяжить эту штуковину под джой. Может есть у кого стоящая инфа по изготовлению сих девайсов? Фотки самого штурвала могу выложить по мере необходимости
-
Да ну? мертвая зона резистора? это как? У меня 2 Logitech'a (Extreme 3D Pro и Force 3D Pro) И все нормально. Нету на железе мертвых зон, поверь мне на слово И я объясню почему: переменные резисторы имеют разные характеристики приращения сопротивления к углу поворота каретки, но чаще всего встречаются линейной и логарифмической характеристикой. Так вот, эти характеристики приводятся к нужной форме для обработки АЦП с помощью обвязки их на плате, тем самым впаяв по резаку параллельно, ты изменил угол приращения нелинейности в цепи, "вроде" обеспечив плавность. На самом же деле проблема в настройке мертвых зон осей джойстика. Тем более ты можешь регулировать линейность вышеобазначеных параметров прямо в самой игре посредством графика в настройке управления, удачи =)