renhanxue
-
Posts
631 -
Joined
-
Last visited
-
Days Won
10
-
You're missing one of my favorites: FOD? Never met her! Also this one, especially from around 3:10 onwards: The camo works!
-

Feedback Thread Viggen Patch Feb 22nd 2024
renhanxue replied to IronMike's topic in DCS: AJS37 Viggen
If actual Viggen pilot @hilmerby says the previous one looked good I'd say that's a pretty good endorsement of it. -
When exactly did the Viggen get Rb75/Mavs
renhanxue replied to Gunfreak's topic in DCS: AJS37 Viggen
According to the SIPRI arms transfer database 500 (estimated) rb 75's were ordered in 1975 and delivered in 1977-1978. The air force may have modified the missiles after that; I have seen documents discussing plans for seeker head modifications in 1979 (see below) but I don't know to what extent the plans were actually implemented. (Document photographed at a visit to the Arboga missile museum years ago; access was not restricted.) -
This thread is from November 2022. Why is it still stickied?
-
I have some vague memory that the TRIMSYST circuit breaker should work, because it's necessary to restore function of the normal trim system after touching any of the emergency trim controls. Or maybe what I'm remembering is that I've claimed that before and found out it didn't work? Not sure.
-
Is the Viggen navigation system inertial or not?
renhanxue replied to renhanxue's topic in DCS: AJS37 Viggen
important follow-up questions: do we need an INS alignment chart (ref: the sandwich alignment chart)? does anyone have a precise technical definition of the Swedish term "momentgyro"? I get the gist of what they do (I think) but I want all of the details -
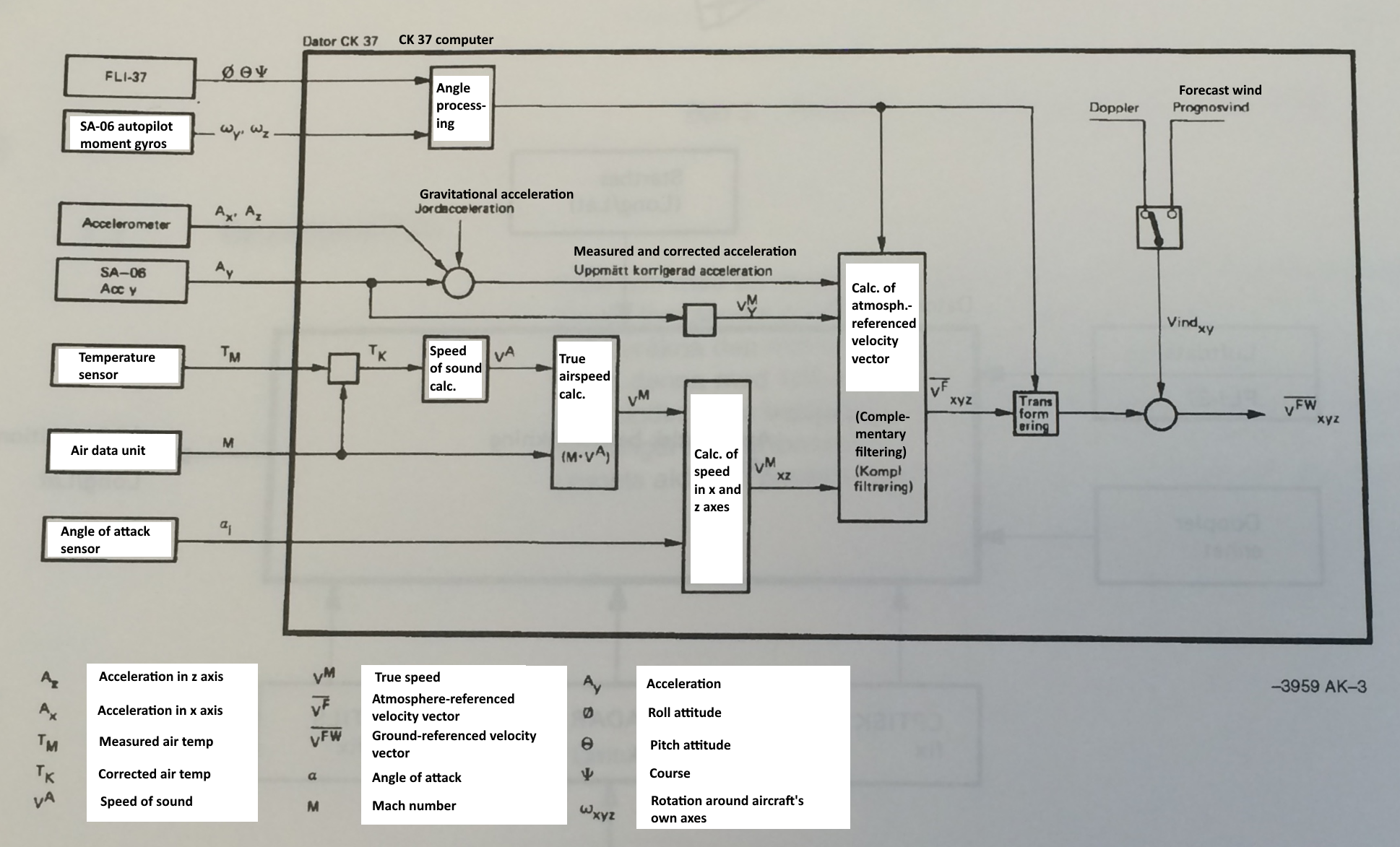
"is the Viggen navigation system inertial or not" - the greatest debate in the history of forums, locked by a moderator after 12,239 pages of heated debate, dril references aside, this question has come up a couple of times before, and earlier today @Rudel_chw asked this in a direct message. This post is mostly a reaction to that. My answer to the question is "not really", or "not primarily". It does use dead reckoning just like an inertial navigation system (INS) does, and it does use accelerometers and attitude gyros just like an INS does, but it does not primarily rely on them, so it's not really inertial. Pseudo-inertial? Partially-inertial? Whatever you might call it. An INS by the usual definition of the term only (or at least primarily) relies on accelerometers and attitude gyroscopes to calculate how it's being moved. The accelerometers measure the acceleration of whatever they're mounted to, and the attitude gyros measure the attitude relative to the earth, and if you combine the two you can figure out how the entire system is moving relative to the Earth. That means an INS is by definition ground-referenced (or rather referenced to Earth's field of gravity, I guess). The Viggen system on the other hand is primarily atmosphere-referenced. I've translated a block diagram from the SFI: As you can see, it starts not from inertial measurements but rather from air data measurements. First it uses temperature and air data to calculate the true airspeed. Then the angle of attack is used to calculate an estimate of the vertical and longitudinal speed separately (transverse speed is assumed to be negligible here). This is then combined with attitude information from the FLI-37 ADI and the autopilot's moment gyros to calculate the aircraft's true velocity vector relative to the air. To get the movement relative to the ground (which is what we actually want), the nav program then compensates for wind speed, which is either measured using a doppler radar (ground speed measurement), or forecast wind as programmed into the computer (input with VIND/RUTA/MÅL). The ground-referenced velocity vector is then calculated and integrated every 103 milliseconds to continually keep the aircraft's position updated. This isn't quite good enough though. There are two problems: first, transverse speed (side to side) can't be calculated from air data, and second, the air data system reacts too slowly to really make this precise enough. To mitigate these problems, there's an accelerometer unit that measures acceleration in the longitudinal and vertical axes; acceleration in the transverse axis is taken from the transverse accelerometer that's used for the autopilot's sideslip correction system (y'know that RENFLYGN knob nobody ever touches). These accelerometers react much faster than the air data system, and so they're used to correct the velocity vector calculated from air data. This taken as a whole is good enough. So, in the transverse axis the system actually is a "real" inertial navigation system - it relies purely on attitude gyros and accelerometers to determine movement in that axis. This, the SFI says, is acceptable because the velocity in the transverse axis is usually more or less net zero (the aircraft doesn't typically fly sideways, after all), with only small variations back and forth, so relying purely on acceleration gives sufficient precision. You might ask though, if the aircraft has attitude gyros and accelerometers anyway, why not just go purely inertial? The main answer is that to do that you'd need much more expensive equipment. You need more precision than the Viggen's gyros and accelerometers actually have to make it work well, and probably you'd need a dedicated computer for it too. INS systems were absolute state of the art in the early 1960's when the Viggen was designed, with the Minuteman and Apollo guidance systems being some of the first really practical examples. You couldn't just buy an INS off-the-shelf in the 60's; Saab would've had to design one in-house. INS became a lot cheaper and more reliable in the 80's with better computers and the commercialization of the ring laser gyro. The Viggen system isn't as accurate as a real INS, but at the time it had a significant cost advantage. It's noteworthy that almost the entire system is just a software program that runs in the CK 37. The only hardware it uses that the aircraft wouldn't otherwise have are the two accelerometers for the longitudinal and vertical axes. It also has the side benefit that it's capable of cold starting in two minutes flat because the gyros just aren't that sensitive. True INS systems of the era could take tens of minutes to align from a cold start. It was an engineering compromise: good enough to fulfill the requirements the air force had, but not more complex and expensive than it had to be.

- 8 replies
-
- 15
-

-

-
@TOViper, on this page on fly37viggen.com you have a link to ATIS 37 on my Google Drive. That's fine, I'm very happy that people are interested in it, but Google in their infinite wisdom has made it so that even though the file is supposed to be publicly viewable, if you don't have the right link to it, it forces people to log into their google accounts and request access to it before they can see it. That means I get an email and have to approve the access every time. I suspect a lot of people just don't do that, but some do and then I get emailed to approve the request. I don't want to have to do that, so could you please replace the link with this one, which should have the appropriate magic that grants access without me having to know about it: https://drive.google.com/file/d/0B8bCDRcq9BVeSGhTa3dRSU41WGc/view?usp=sharing&resourcekey=0-yyayxaqfe_YfaWn2AkDROw
-
You're already keeping a change log of edits, clearly what you should do is just adopt the SFI's system where each page is dated individually and changes compared to the base version are highlighted with a black bar in the margin :V
-
Regarding the inverted plunging spiral, the SFI defines it as different from an inverted spin (there is also an extremely rare non-inverted plunging spiral). A long time ago I translated the relevant part of the SFI, so I'll just paste that here. 24.4 Departure from controlled flight 24.4.1 Superstall and spin If the angle of attack exceeds the permitted limits, some yaw disturbances appear around alpha 25-28°, and at alpha 28-30° there are weak pitch-up tendencies. If the stick is moved forward to counter the pitch-up, the aircraft returns to normal alpha, possibly after overshooting up to alpha ~50°. Note that the angle of attack instrument only shows the area -4° to +26°. If the stick movement forward at the pitch-up is too small or is made too late, such that the angle of attack does not immediately decrease, the aircraft departs into superstall or spin. Superstall is characterized by: indicated alpha 26° (actually around 60°) low rate of rotation (< 40°/s) stable or oscillating nose attitude Two types of spin may be encountered: Oscillating spin (most common) indicated alpha 26° (actually around 60°) moderate to high rate of rotation (> 40°/s) moderate to powerful oscillations in pitch and/or roll Flat spin indicated alpha 26° (actually around 70°) high rate of rotation (up to 120°/s) weak or no oscillations in pitch and/or roll The sink rate in a superstall or spin is around 100 m/s. If the pitch-up occurs without aileron input, the departure usually results in superstall. If the pitch-up occurs with any aileron input active, the aircraft is affected by adverse yaw and the likelihood of a spin increases. [...] The oscillating spin may after ≥15 s diverge such that the aircraft rolls inverted, and from there it usually recovers to controlled flight on its own with control surfaces neutral (but see also the section on "inverted plunging spiral" below). In superstall or spin the pitch authority is good, which eases recovery. Aileron input results in adverse yaw, that is to say rolling right gives a yaw to the left and vice versa. Rudder authority is negligible. Recovery from superstall and oscillating spin is accomplished by moving the stick to a position somewhat forward of the neutral pitch position, with ailerons and rudder neutral. To recover from a flat spin, the yawing rotation must be stopped first, which is accomplished with neutral pitch and full roll input in the direction of the rotation ("stick into the spin"). When the rotation has just about ceased, recovery is accomplished with neutral ailerons and the stick somewhat forward of neutral, just like when recovering from superstall and oscillating spin. If the center of gravity is particularly far aft (aircraft with heavy loads on V7 (wing pylons) and no load on S7 (fuselage pylons)) the pitch-up tendency is more pronounced than with normal CoG positions. To return to a normal angle of attack a stronger pitch down input is required; the stick must be moved close to its fully forward position. These characteristics are not affected to any significant degree by fuselage mounted loads. The characteristics with both fuselage and underwing loads are not known but are assumed to be the same as with only fuselage loads. Stalled inverted attitudes have not been possible to achieve in flight tests. Moving the stick fully forward gives alpha about -30°, there are no pitch-up (pitch-down?) tendencies and when the stick is moved back to neutral the aircraft returns to a normal angle of attack. 24.4.2 Plunging spiral In certain scenarios with a particular type of adverse dynamics, the aircraft can enter an uncontrolled attitude of the autorotating type, here called plunging spiral. The plunging spiral, which can be either right side up or inverted, is considered to be the potentially most dangerous form of uncontrolled flight that has been discovered during the spin tests of aircraft 37. 24.4.2.1 Inverted plunging spiral The most common form of the plunging spiral is the inverted one. The following attitudes/maneuvers repeatably result in an inverted plunging spiral: Somersault into inverted position from oscillating spin (for example while attempting to recover from a spin with the stick fully forward) Stalling the tailfin through so-called "knife flying" (TN: knife edge?) The inverted plunging spiral is characterized by the following: Negative load factor (-1 to -3) Low nose Very high rate of rotation in the roll axis (≥ 200°/s) High sink rate (≥ 150 m/s) Moving the stick back and/or aileron input to either side tends to increase the rate of the roll rotation. The rotation can be stopped by moving the stick fully forward with no aileron input. When the rotation has ceased, the stick is moved back to neutral pitch, and the aircraft returns to controlled flight. 24.4.2.2 Non-inverted plunging spiral The aircraft only departed into a non-inverted plunging spiral on a few occasions during the spin tests. It has not been possible to define any repeatable attitude or maneuver that results in a non-inverted plunging spiral. During the spin tests the non-inverted plunging spiral only occurred on the following two occasions (not repeatable): When recovering from an inverted superstall When recovering from an oscillating non-inverted spin The non-inverted plunging spiral is characterized by the following: Positive load factor (+1 to +3) Low nose Very high rate of rotation in the roll axiss (≥ 200°/s) High sink rate (≥ 150 m/s) In a non-inverted plunging spiral, aileron inputs have no effect. Instead, the roll rotation must be stopped by pulling gently back on the stick until the rotation ceases. When the rotation has ceased, the stick is moved forward to the neutral pitch position and the aircraft recovers into controlled flight.
-
Regarding the flameout detector, see also
-
Unfortunately the only tactical field manual I have access to for the Swedish air force strike groups is the 1961 edition with corrections/updates added up until 1967, but that one does have doctrinal advice for rb 04 usage (in its earlier incarnations, carried by the A 32 Lansen). It states that against cruisers and frigates rb 04 is the weapon system of choice, with bombs and armor-piercing rockets as secondary alternatives if missiles are not available. It then outlines these rules of thumb for sizing the strike package: The relevant item here is the 4th item from the top, "Raid eller mineringsföretag" (mineringsföretag = mine laying), against which it suggests deploying anywhere between 1 and 6 full squadrons of 8 aircraft. The two right columns make recommendations regarding sub-targets. Against a cruiser (Sverdlovs in this era), deploy anything between a squadron or a flight (half squadron; 4 aircraft), against a frigate or a destroyer use a flight or a twoship, against any smaller surface combatant use a twoship or possibly a single aircraft. The A 32 didn't really have countermeasure pods (not widely available ones at any rate) so it's two missiles per aircraft. On a side note the Rb 15F's lowest sea skimming altitude isn't fixed; it's "waveheight adaptive". I don't have any information on what that means specifically but it certainly sounds pretty low.
-
The document doesn't say. If I had to guess I'd say 70% fuel because that's the standard used for the in-flight diagrams in the SFI, but it's far from certain. The aerodynamics compendium has two parts and the graphs in the other part frequently use specific weights to illustrate some point, but then it's always stated what that weight is. So, I really don't know. According to the aerodynamics compendium the RM8A (on the AJ 37) starts compressor stalling at around 20° alpha, leaving only a small margin of error from the limit of 18°. I don't know how the DCS implementation does these days. The RM8B in the JA 37 is significantly better; the alpha limit is 23° and the engine reportedly does not start compressor stalling below 25°, which is the point where the aircraft starts losing longitudinal stability and you risk superstall or spin. That means the AJS 37 should not be able to reach the JA 37's level without compressor stalling even if you exceed the 18° limit significantly. I don't have much to add; if anything I think you might be slightly too generous to the AJS 37 in terms of sustained turn rate, but that's just gut feeling, no numbers to back it up. It's really a pity that we don't have a good JA 37 simulator...
-
Sounds fun
-
It shouldn't be possible, isn't that the point? The record attempt described in the book starts out with the assumption that the aircraft could be lightened by 1000 kg by removing the radar, various avionics, the hydraulics for folding the tailfin, the thrust reverser etc and then also increase the engine power by 10%. So if you manage to achieve it in DCS the simulation is overperforming significantly.